Downloads
Stable Estimator of Dynamical Systems (SEDS):- You could get this library from:
git clone https://bitbucket.org/khansari/seds SEDS
LASA Handwriting Dataset:
This dataset contains a library of 2D handwriting motions recorded from Tablet-PC. For each motion, the user was asked to draw 7 demonstrations of a desired pattern, by starting from different initial positions (but fairly close to each other) and ending to the same final point. These demonstrations may intersect each other. In total a library of 30 human handwriting motions were collected, of which 26 each correspond to one single pattern, the remaining four motions each include more than one pattern (called Multi Models).
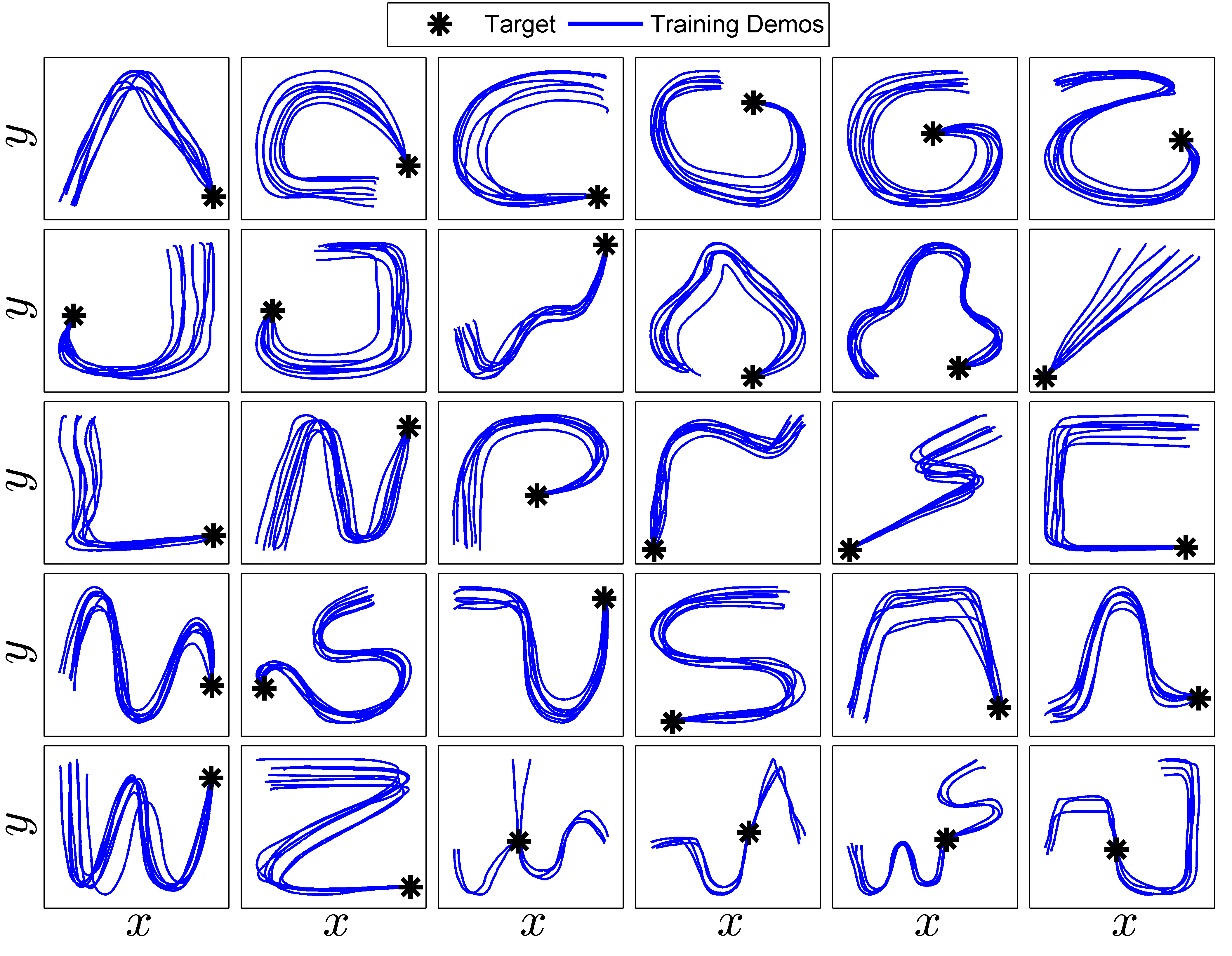
Fig. 1-2 Illustration of LASA Handwriting DataSet.
This dataset was initially used to validate the performance of SEDS in (Khansari & Billard, TRO 2011). It has been later extended and used within the European project AMARSi as the benchmark dataset to evaluate the performance of different movement generator algorithms.
The latest version of the dataset can be downloaded from:
git clone https://bitbucket.org/khansari/lasahandwritingdataset LASADataset
Please cite (Khansari & Billard, TRO 2011) when using this dataset.
Note: The previous version is available by typing git checkout 838e1d8 after cloning from the repository.
DS-based Obstacle Avoidance:
- You could get this library from:
git clone https://bitbucket.org/khansari/obstacleavoidance ObstacleAvoidance
Learning Lyapunov Function:
- You could get this library from:
git clone https://bitbucket.org/khansari/clfdm CLFDM