CS225A : Project Details
The primary focus of the class is to work on projects that involve implementing complex behaviors with robots. This year, we will support three project tracks. Follow your interests.
Track M: Robot Manipulation
Track T: Robot Teleoperation
Track H: Humanoids
The Robots.

Puma 500
The Puma's reliability and robustness have made it the workhorse of choice for many CS225A projects.

Kuka LWR
The Kuka's torque control and seven degrees of freedom make it ideal for complex manipulation tasks.

Kuka IIWA
The newest version of Kuka's lightweight arm, position controlled for simple programming.

WAM
This seven degree of freedom arm uses a slick cable-drive giving it low-inertia and great joint-torque control.
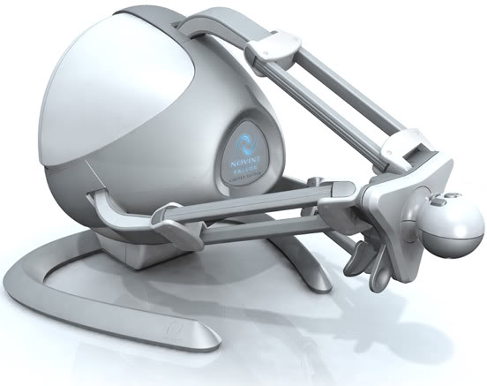
Novint Falcon
The Novint Falcon provides force feedback while teleoperating robots to perform manipulation tasks.
Project Resources
Kuka IIWA
Instructions on how to use the iiwa are in the SCL wiki, under the Kuka iiwa Operation section.
Puma 560
Instructions on how to use the Puma are here.
OptiTrack
- Turn on the system. Power on the power strip for the cameras. Look for a white power strip next to a black cisco box, with about 20 black ethernet cables coming out of it.
- Application. Login to the windows machine (right computer), using the StudentOptiTrack account. Open Motiv application on the desktop. Open existing camera calibration "10CamCalibration". Cameras will show up in the viewer as pyramid things.
- Specify rigid bodies. Click button "rigid body properties". It's the little button with four dots in a square, between the video tape icon and the person icon. Markers should show up in the viewer. Select the markers belonging to a rigid body. Click the "create from selection" button in the rigid body pane. Name the rigid body. In the display options, set orientation to true. In the orientation tab, you may "reset to current orientation" to do exactly that.
- Broadcast data. In the data streaming panel, check the "broadcast frame data" box.
- Collect data. On a linux machine, use the optitrack.cpp file (to be distributed). See the exampleCode.cpp for an example.
- Turn off the system. Logoff the windows machine. Shutoff the power strip for the cameras. Have a fantastic day.
Kinect
We have one Microsoft Kinect.
Computer vision
We have two Point Grey GigE cameras. If you can localize objects in real-time, please share the code! It would be super useful for the lab's underwater robotic project.
Potential Projects
We encourage you to conceive your own projects. That said, feel free to draw ideas from some projects listed here.
| Focus Area | Project Idea | Robots |
|---|---|---|
| Optimal Trajectory Generation | Train a robot to be the fastest nerf gun slinger in the west. | Puma, Kuka |
| Non-Convex Contact Manipulation | Teach a robot to assemble a mountain of non-convex junk. | Puma, Kuka |
| Soft-Contact Teleoperation | Teleoperate a robot to perform surgery on soft objects. | Falcon, Puma, Kuka |
| Human-Robot Transfer Learning | Use human demonstrations to teach a robot to dance. Gangnam Style! | Asimo |
| Synthesize Human Motions | Teach a simulated biomechanical model to move like a human. | Skeletor |
Designed by Samir Menon.
© Stanford University.
Last updated on Mar 25th, 2019