

From the moment we wake up in the morning until our head hits the pillow
at night, we must plan our actions. Planning includes choosing the
day's outfit based on the weather forecast, figuring out what to eat for
breakfast, deciding the best route to work after listening to the traffic
reports, and making a schedule of activities for the day. Planning
also occurs on another more instinctual level and includes decisions that
we may take for granted, such as choosing to walk around a piece of furniture
rather than climb over it in order to get to the door and deciding to take
as straight and direct a path as possible rather than meander in circles
when trying to reach a destination. A large problem in the development
of autonomous robots is devising a way to give them the capabilities to
make their own plans in a variety of situations. Motion planning
refers to the computational process of moving from one place to another
in the presence of obstacles.
The degree of difficulty of motion planning in robots varies greatly depending
on a couple of factors: whether all information regarding the obstacles
(i.e. sizes, locations, motions, etc.) is known before the robot moves
and whether these obstacles move around or stay in place as the robot moves.
The different possible scenarios are shown in the following chart:
| Static Obstacles | Dynamic Obstacles | |
| Completely Known | Case I | Case II |
| Partially
Known |
Case III | Case IV |
The simplest scenario, and therefore the most researched and understood one, is Case I. In Case I, all obstacles are fixed in their positions, and all details about these obstacles are known before path planning takes place. The problem for the robot, which is known as the basic motion planning problem, can be informally stated as getting from a starting point to an ending point without colliding with any obstacles. This problem is usually solved in the following two steps:
This approach is dependent upon the concepts of configuration
space and a continuous path. A set of one-dimensional curves,
each of which connect two nodes of different polygonal obstacles, lie in
the free space and represent a
roadmap R. That is, all line segments that connect a vertex
of one obstacle to a vertex of another without entering the interior of
any polygonal obstacles are drawn. This set of paths is called the
roadmap. If a continuous path can be found in the free space of R,
the initial and goal points are then connected to this path to arrive at
the final solution, a free path.
If more than one continuous path can be found and the number of nodes in
the graph is relatively small, Dijkstra's shortest path algorithm is often
used to find the best path.
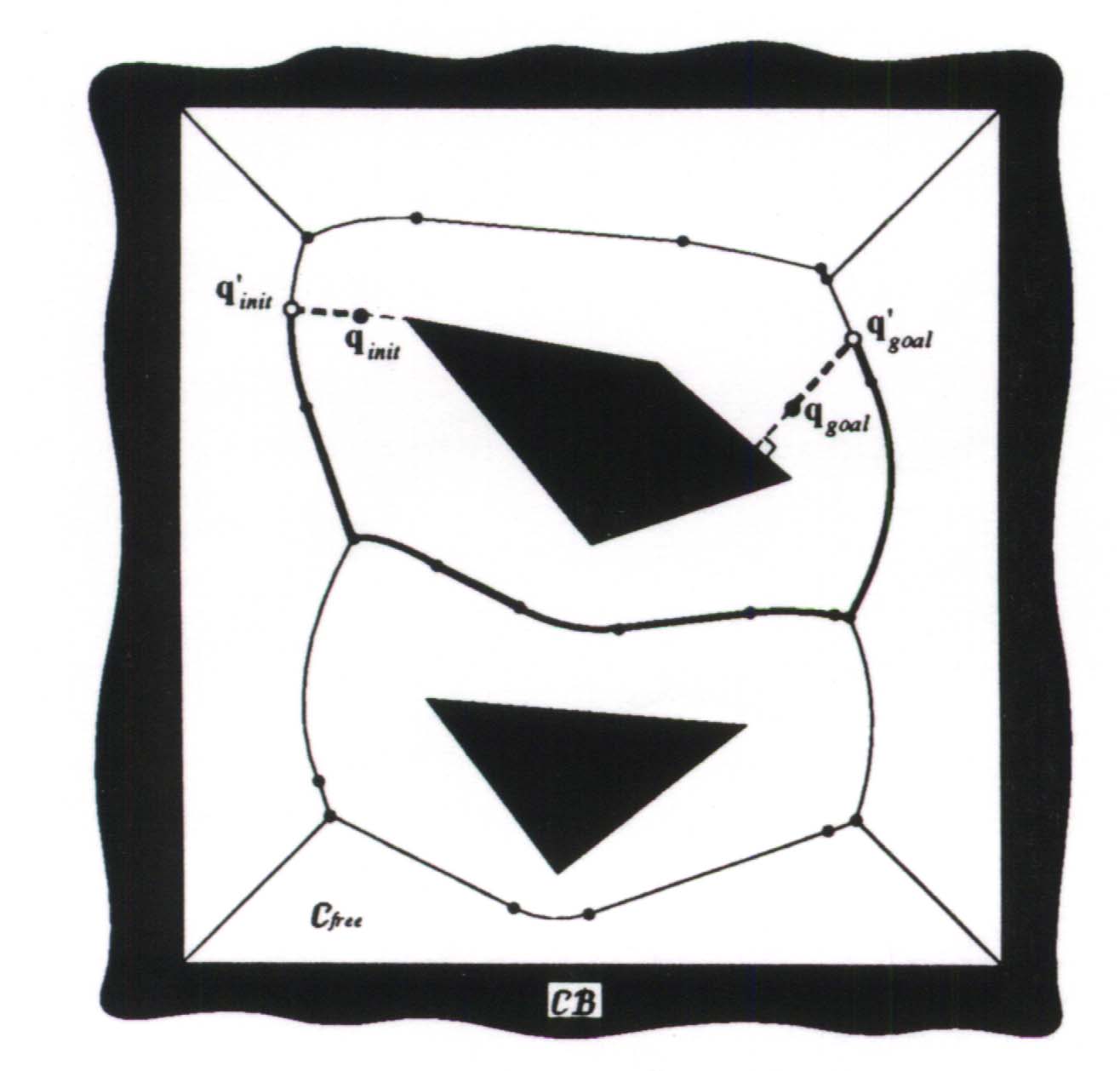
There are various types of roadmaps, including the visibility graph, the
Voronoi diagram, the freeway net, and the silhouette. One of the
earliest path planning methods was the visibility graph method, explored
by NJ Nilsson as early as 1969. A visibility graph is shown below.
The shaded areas represent obstacles. The solid lines are the edges
of the graph and connect the vertices of the obstacles. The dotted
lines connect the beginning and end configurations with the roadmap.
The figure
below shows a Voronoi diagram in a configuration space with a polygonal
C-obstacle region. This diagram is a planar network of line segments
and parabolic curves, which are the set of points equidistant from at least
two obstacles. The path generated by this method keeps the robot
as far away from the obstacles as possible, unlike the visibility graph.
The basic idea
behind this method is that a path between the initial configuration and
the goal configuration can be determined by subdividing the free space
of the robot's configuration into smaller regions called cells. After
this decomposition, a connectivity graph, as shown below, is constructed
according to the adjacency relationships between the cells, where the nodes
represent the cells in the free space, and the links between the nodes
show that the corresponding cells are adjacent to each other. From
this connectivity graph, a continuous path, or channel, can be determined
by simply following adjacent free cells from the initial point to the goal
point. These steps are illustrated below using both an exact cell
decomposition method and an approximate cell decomposition method.
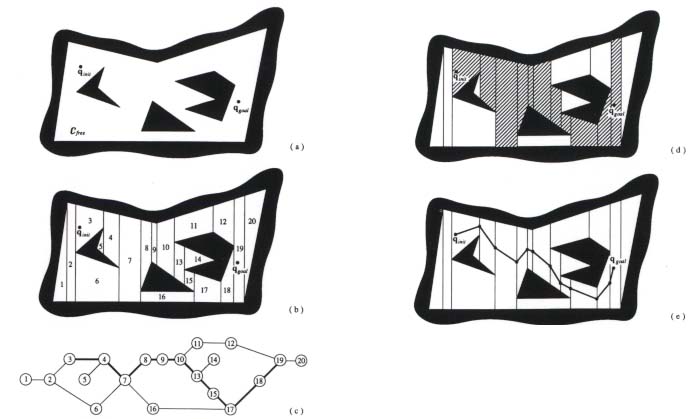
Exact Cell Decomposition
The first
step in this type of cell decomposition is to decompose the free space,
which is bounded both externally and internally by polygons, into trapezoidal
and triangular cells by simply drawing parallel line segments from each
vertex of each interior polygon in the configuration space to the exterior
boundary. Then each cell is numbered and represented as a node in
the connectivity graph. Nodes that are adjacent in the configuration
space are linked in the connectivity graph. A path in this graph
corresponds to a channel in free space, which is illustrated by the sequence
of striped cells. This channel is then translated into a free path
by connecting the initial configuration to the goal configuration through
the midpoints of the intersections of the adjacent cells in the channel.
Approximate Cell Decomposition
This approach to cell decomposition is different because it uses a recursive method to continue subdividing the cells until one of the following scenarios occurs:

Both exact cell decomposition methods and approximate cell decomposition methods have advantages and disadvantages. The former are guaranteed to be complete, meaning that if a free path exists, exact cell decomposition will find it; however, the trade-off for this accuracy is a more difficult mathematical process. Approximate cell decomposition is less involved, but can yield similar, if not exactly the same, results as exact cell decomposition.
The potential
field method involves modeling the robot as a particle moving under the
influence of a potential field that is determined by the set of obstacles
and the target destination. This method is usually very efficient
because at any moment the motion of the robot is determined by the potential
field at its location. Thus, the only computed information has direct
relevance to the robot's motion and no computational power is wasted.
It is also a powerful method because it easily yields itself to extensions.
For example, since potential fields are additive, adding a new obstacle
is easy because the field for that obstacle can be simply added to the
old one.
The method's
only major drawback is the existence of local minima. Because the
potential field approach is a local rather than a global method (it only
considers the immediate best course of action), the robot can get "stuck"
in a local minimum of the potential field function rather than heading
towards the global minimum, which is the target destination. This
is frequently resolved by coupling the method with techniques to escape
local minima, or by constructing potential field functions that contain
no local minima.