Useful Definitions
Configuration space
This concept
is used in robot motion planning among stationary, known objects (case
I). The configuration space is a transformation from the physical
space in which the robot is of finite-size into another space in which
the robot is treated as a point. In other words, the configuration
space is obtained by shrinking the robot to a point, while growing the
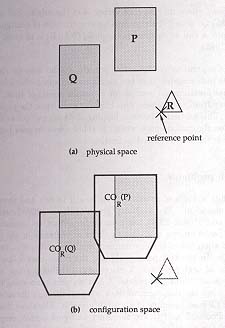
obstacles by the size of the robot. The figures below illustrates
the conecpt of configuration space. In figure a, P and Q are fixed
obstacles in physical space, and R is the robot, whose orientation is fixed.
Figure b shows the corresponding configuration space.