
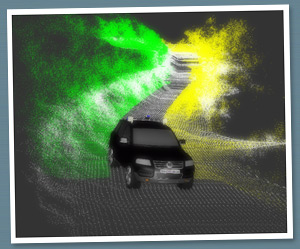
The Stanford Vehicle (nicknamed "Stanley") is based on a stock, Diesel-powered Volkswagen Touareg R5, modified with full body skid plates and a reinforced front bumper. Stanley is actuated via a drive-by-wire system developed by Volkswagen of America's Electronic Research Lab. All processing takes place on seven Pentium M computers, powered by a battery-backed, electronically-controlled power system. The vehicle incorporates measurements from GPS, a 6DOF inertial measurement unit, and wheel speed for pose estimation. While the vehicle is in motion, the environment is perceived through four laser range finders, a radar system, a stereo camera pair, and a monocular vision system. All sensors acquire environment data at rates between 10 and 100 Hertz. Map and pose information are incorporated at 10 Hz, enabling Stanley to avoid collisions with obstacles in real-time while advancing along the 2005 DARPA Grand Challenge route. The development of Stanley began in July 2004. At the time of the initial team application, the vehicle is largely functional and has logged dozens of autonomous miles along the 2004 DARPA Grand Challenge course.
|