Overview
Modeling multi-agent systems requires understanding how agents interact. Such systems are often difficult to model because they can involve a variety of types of interactions that layer together to drive rich social behavioral dynamics. Leading approaches in modeling multi-agent systems use use graph neural networks (GNNs) to infer edge types for every pair of entities in the interacting systems. However, GNNs do not explicitly handle the multiple layers of interactions present in social multi-agent systems and, as shown empirically, has led to at least two shortcomings: reduced performance on long-term predictions and decreased interpretability.
Relational Prediction
Controlled Generation
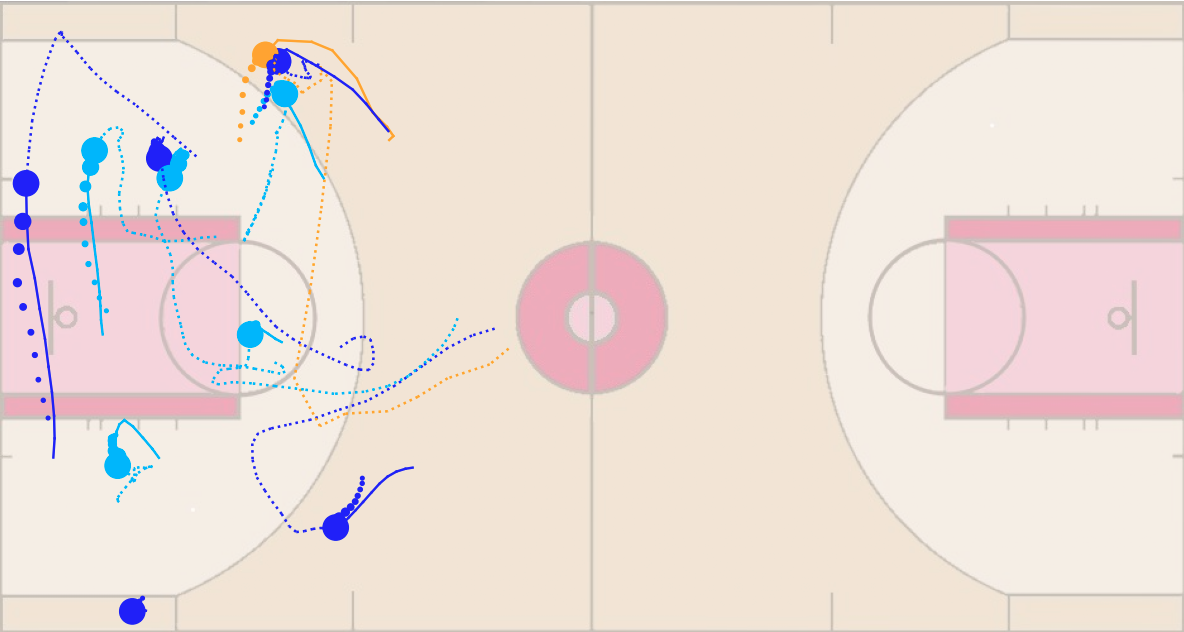
Additional Visualizations
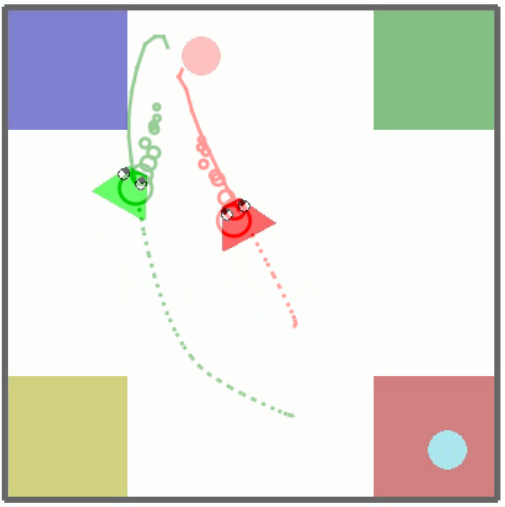
RFM
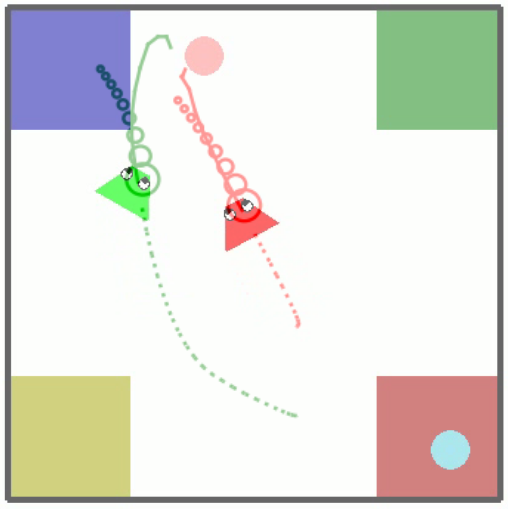
IMMA (ours)
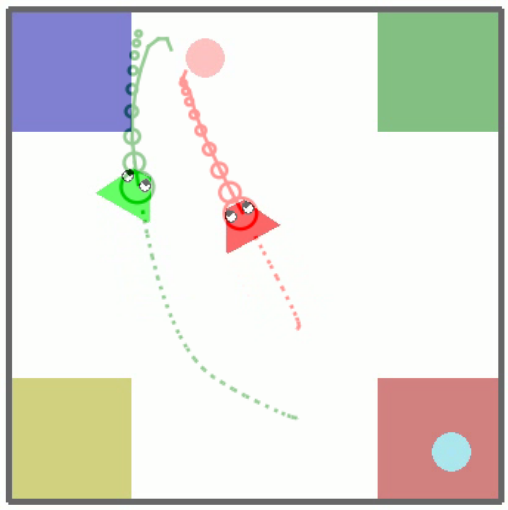
MLP
RFM
IMMA (ours)
Please send any question to Fan-Yun Sun.