
|
Vehicle Tracking for Autonomous Urban Driving |
|
The Stanford Racing Team aims to develop vehicles able to drive autonomously in urban environments. One of the team’s robots, Junior, participated in the Urban Grand Challenge, where the robots had to autonomously navigate in a mock urban town and follow the California rules with respect to other robots, human-driven vehicles and the environment. The most challenging conditions were presented at the pre-qualification event immediately prior the competition in Area A trials.
This page focuses on the vehicle detection and tracking subsystem of Junior. For other aspects please see the team’s website.
New Videos (June 2011): Geometric shape estimation allows us to track each vehicle position very accurately. Hence, we can build full 3D models of passing vehicles. The video below shows the resulting 3D model for a bus (shown in green). · 3D shape estimation for a bus
Videos: · Tracking in Alameda port town · Technical Overview of Vehicle Tracking
Our Scaling Series algorithm greatly improves the reliability of vehicle detection. In these videos, the tracker was forced to drop the target to verify reliability of vehicle detection. · Vehicle Detection with Scaling Series · Vehicle Detection without Scaling Series
Overall Junior Performance: · Junior performing in Area A at UGC (spectator view) · Junior performing in Area C at UGC (spectator view)
Other materials: · Slides from ICRA09 Workshop on Safe Navigation [slides] · Poster from RSS08 and Stanford Computer Forum [poster]
Relevant publications: Awareness of Road Scene Participants for Autonomous Driving. A. Petrovskaya, M. Perrollaz, L. Oliveira, L. Spinello, R. Triebel, A. Makris, J.-D. Yoder, C. Laugier, U. Nunes, and P. Bessiere . In Handbook of Intelligent Vehicles, pp. 1383-1432, Springer 2012. [pdf] [SpringerLink] Model Based Vehicle Detection and Tracking for Autonomous Urban Driving. Anna Petrovskaya and Sebastian Thrun. Autonomous Robots Journal, vol. 26(2-3), pp. 123--139, April 2009. [pdf] [Springer] Model Based Vehicle Tracking in Urban Environments. Anna Petrovskaya and Sebastian Thrun. ICRA 2009, Workshop on Safe Navigation. [pdf] [slides] Junior: The Stanford Entry in the Urban Challenge. M. Montemerlo, J. Becker, S. Bhat, H. Dahlkamp, D. Dolgov, S. Ettinger, D. Haehnel, T. Hilden, G. Hoffmann, B. Huhnke, D. Johnston, S. Klumpp, D. Langer, A. Levandowski, J. Levinson, J. Marcil, , D. Orenstein, J. Paefgen, I. Penny, A. Petrovskaya, M. Pflueger, G. Stanek, D. Stavens, A. Vogt, and S. Thrun. Field and Service Robot Journal 2008. [pdf] Model Based Vehicle Tracking for Autonomous Driving in Urban Environments. Anna Petrovskaya and Sebastian Thrun. RSS 2008. [pdf] [poster] Efficient Techniques for Dynamic Vehicle Detection. Anna Petrovskaya and Sebastian Thrun. ISER 2008. [pdf] |

|
Fig. 1. Junior negotiating an intersection at the Urban Grand Challenge in 2007. |
|
Fig. 2. Junior’s sensors: Applanix INS for localization, several laser range finders and radars. |



|
Fig. 4. Working with 3D data. Left to right and top to bottom: actual scene, Velodyne data, classification of points, generated virtual scan overlaid on Velodyne data. |



|
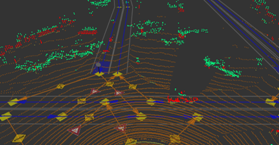
Fig. 3. Tracking results at the Area A test during the Urban Challenge pre-qualification event. Top to bottom: actual scene, tracking overlaid on Velodyne data, tracking overlaid on virtual scan. For more results see the videos. |