My research interests span computer animation, robotics, reinforcement learning, physics simulation, optimal control, and computational biomechanics. The goal of our lab is to recreate coordinated voluntary animal movements in digital world and on robotic platforms. In particular, we will focus on holistic motor behaviors that involve fusing multiple modalities of perception to produce coordinated, balanced, and precise whole-body movements to interact with the world. We are interested in the functionality of motor skills, as well as how they are learned or acquired. My colleagues and I developed computational approaches to modeling realistic and natural human movements, learning complex control policies for humanoids and assistive robots, and advancing fundamental numerical simulation and optimal control algorithms. I received a National Science Foundation CAREER Award, an Alfred P. Sloan Fellowship, and was named Young Innovators Under 35 by Technology Review. In 2012, I received the ACM SIGGRAPH Significant New Researcher Award for my contribution in the field of computer graphics. I am the Technical Papers Chair for SIGGRAPH Asia 2019.
I am looking for PhD students interested in robotics and/or computer animation to join my lab. I am particular interested in students who have strong math background and programming experiences in optimal control or reinforcement learning.
You might be looking for...
-
•DART is an open-source multi-body physics simulator widely used for robotics and computer graphics applications. It is one of the supported physics engines by Gazebo.
-
•DartEnv is a fork from OpenAI Gym compatible with rllab and baselines libraries. It supports DART as one of the physics engines to simulate 3D dynamic learning tasks.
-
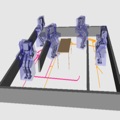
•Robotic Assistance with Dressing s a NSF-funded project for developing assistive robots to put clothes on people in need.
-
•A short tutorial on multibody dynamics.
-
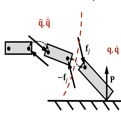
•A short tutorial on formulating contact constraints for multibody systems.
-
•My PhD thesis.
Research

Learning a Control Policy for Fall Prevention on an Assistive Walking Device, Visak CV Kumar, Sehoon Ha, Gregory Sawicki, C. Karen Liu.
[arXiv] [Video] [Code]

Assistive Gym: A Physics Simulation Framework for Assistive Robotics, Zackory Erickson, Vamsee Gangaram, Ariel Kapusta, C. Karen Liu, and Charles C. Kemp.

Synthesis of Biologically Realistic Human Motion Using Joint Torque Actuation, Yifeng Jiang, Tom Wouwe, Friedl De Groote and C. Karen Liu. in Transactions on Graphics (SIGGRAPH), 2019

Personalized collaborative plans for robot-assisted dressing via optimization and simulation, Ariel Kapusta, Zackory Erickson, Henry M. Clever, Wenhao Yu, C. Karen Liu, Greg Turk, Charles C. Kemp, Autonomous Robots, 2019.
[Paper] [Video] [Code]

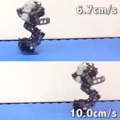
Sim-to-Real Transfer for Biped Locomotion, Wenhao Yu, Visak CV Kumar, Greg Turk and C. Karen Liu, in IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), 2019
Policy Transfer with Strategy Optimization, Wenhao Yu, C. Karen Liu, Greg Turk, International Conference on Learning Representations (ICLR), 2019.

Multidimensional Capacitive Sensing for Robot-Assisted Dressing and Bathing, Zackory Erickson, Henry M. Clever, Vamsee Gangaram, Greg Turk, C. Karen Liu, and Charles C. Kemp, International Conference on Rehabilitation Robotics (ICORR), 2019.
[arXiv] [Video] [Code]
Data-Augmented Contact Model for Rigid Body Simulation, Yifeng Jiang, Jiazheng Sun, and C. Karen Liu
Expanding Motor Skills through Relay Neural Networks, Visak C.V. Kumar, Sehoon Ha, and C. Karen Liu, in Conference on Robot Learning (CoRL), 2018

Learning to Dress: Synthesizing Human Dressing Motion via Deep Reinforcement Learning, Alex Clegg, Wenhao Yu, Jie Tan, C. Karen Liu and Greg Turk, in Transactions on Graphics (SIGGRAPH Asia), 2018

Learning Symmetric and Low-Energy Locomotion , Wenhao Yu, Greg Turk, and C. Karen Liu in Transactions on Graphics (SIGGRAPH), 2018



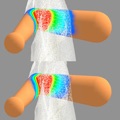
Data-Driven Approach to Simulating Realistic Human Joint Constraints, Yifeng Jiang and C. Karen Liu in IEEE International Conference on Robotics and Automation (ICRA), 2018

Deep Haptic Model Predictive Control for Robot-Assisted Dressing, Zackory Erickson, Henry M. Clever, Greg Turk, C. Karen Liu, and Charles C. Kemp in IEEE International Conference on Robotics and Automation (ICRA), 2018

Stair Negotiation Made Easier Using Novel Interactive Energy-Recycling Assistive Stairs, Yun Seong Song, Sehoon Ha, Hsiang Hsu, Lena H. Ting, and C. Karen Liu, in PLOS ONE, 2017

Learning a Unified Control Policy for Safe Falling, Visak C.V. Kumar, Sehoon Ha, and C. Karen Liu, in IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), 2017

Learning to Navigate Cloth using Haptics, Alex Clegg, Wenhao Yu, Zackory Erickson, C. Karen Liu, and Greg Turk, in IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), 2017

Preparing for the Unknown: Learning a Universal Policy with Online System Identification, Wenhao Yu, Jie Tan, C. Karen Liu, and Greg Turk, Robotics Science and Systems (RSS), 2017

Probabilistic Completeness of Randomized Possibility Graphs for Bipedal Walking in Semi-Unstructured Environments, Michael X. Grey, Aaron D. Ames, and C. Karen Liu, in Robotics Science and Systems (RSS), 2017
[PDF] [Video]
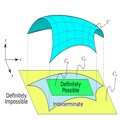
Footstep and Motion Planning in Semi-unstructured Environments Using Randomized Possibility Graphs, Michael X. Grey, Aaron D. Ames, and C. Karen Liu, in IEEE International Conference on Robotics and Automation (ICRA), 2017

Haptic Data Simulation for Robot-Assisted Dressing, Wenhao Yu, Ariel Kapusta, Charlie Kemp, Greg Turk, and C. Karen Liu, in IEEE International Conference on Robotics and Automation (ICRA), 2017
What Does the Person Feel? Learning to Infer Applied Forces during Robot-Assisted Dressing, Zackory Erickson, Alex Clegg, Wenhao Yu, Greg Turk, C. Karen Liu, and Charlie Kemp, in IEEE International Conference on Robotics and Automation (ICRA), 2017

Differential Dynamic Programming with Nonlinear Constraints, Zhaoming Xie, C. Karen Liu, and Kris Hauser, in IEEE International Conference on Robotics and Automation (ICRA), 2017
[PDF] [Video]
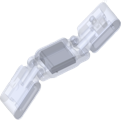
A Linear-Time Variational Integrator for Multibody Systems, Jeongseok Lee, C. Karen Liu, Frank C. Park, and Siddhartha S. Srinivasa, in Workshop on the Algorithmic Foundations of Robotics (WAFR), 2016
[PDF] [Video]

Simulation-Based Design of Dynamic Controllers for Humanoid Balancing, Jie Tan, Zhaoming Xie, Byron Boots, and C. Karen Liu, in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016
Humanoid Manipulation Planning using Backward-Forward Search, Michael X. Grey, Caelan R. Garrett, C. Karen Liu, Aaron D. Ames, and Andrea L. Thomaz, in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016

Data-Driven Haptic Perception for Robot-Assisted Dressing, Ariel Kapusta, Wenhao Yu, Tapomayukh Bhattacharjee, C. Karen Liu, Greg Turk, and Charles C. Kemp, in IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2016

Artist-Directed Dynamics for 2D Animation, Yunfei Bai, Danny Kaufman, C. Karen Liu, and Jovan Popovic in Transactions on Graphics (SIGGRAPH), 2016
Evolutionary Optimization for Parameterized Whole-body Dynamic Motor Skills, Sehoon Ha and C. Karen Liu, in IEEE International Conference on Robotics and Automation (ICRA) 2016
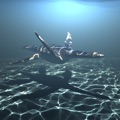
Computer Simulations Imply Forelimb-Dominated Underwater Flight in Plesiosaurs, Shiqiu Liu, Adam S. Smith, Yuting Gu, Jie Tan, C. Karen Liu and Greg Turk, in PLoS Computational Biology 2016

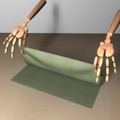
Dexterous Manipulation of Cloth, Yunfei Bai, Wenhao Yu (co-first author), and C. Karen Liu, in Computer Graphics Forum (Eurographics), 2016

Multiple Contact Planning for Minimizing Damage of Humanoid Falls, Sehoon Ha and C. Karen Liu, in IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), 2015

Animating Human Dressing, Alex Clegg, Jia Tan, Greg Turk, and C. Karen Liu, in Transactions on Graphics (SIGGRAPH), 2015

Online Control of Simulated Humanoids Using Particle Belief Propagation, Perttu Hamalainen, Joose Rajamaki, and C. Karen Liu, in Transactions on Graphics (SIGGRAPH), 2015

Leveraging Depth Cameras and Wearable Pressure Sensors for Full-body Kinematics and Dynamics Capture, Peizhao Zhang, Kristin Siu, Jianjie Zhang C. Karen Liu, and Jinxiang Chai, in Transactions on Graphics (SIGGRAPH Asia), 2014
Coupling Cloth and Rigid Bodies for Dexterous Manipulation, Yunfei Bai and C. Karen Liu, in Motion in Games, 2014 (Best Student Paper Award)
Orienting in Mid-air through Configuration Changes to Achieve a Rolling Landing for Reducing Impact after a Fall, Jeffrey T. Bingham, Jeongseok Lee, Ravi N. Haksar, Jun Ueda, and C. Karen Liu, in IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), 2014

Learning Bicycle Stunts, Jie Tan, Yuting Gu, C. Karen Liu, and Greg Turk, in Transactions on Graphics (SIGGRAPH), 2014

Iterative Training Of Dynamic Skills Inspired By Human Coaching Techniques, Sehoon Ha and C. Karen Liu, in Transactions on Graphics, 2014
Dexterous Manipulation Using Both Palm and Fingers, Yunfei Bai and C. Karen Liu, in IEEE International Conference on Robotics and Automation (ICRA), 2014

Generating Human-like Motion for Robots, Michael J. Gielniak, C. Karen Liu, and Andrea L. Thomaz, in The International Journal of Robotics Research, 2013
[PDF] [Video]

Physics Storyboards, Sehoon Ha, Jim McCann, C. Karen Liu, and Jovan Popovic, in Computer Graphics Forum (Eurogrphics), 2013

Falling and Landing Motion Control for Character Animation, Sehoon Ha, Yuting Ye and C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH Asia), 2012

Synthesis of Concurrent Object Manipulation Tasks, Yunfei Bai, Kristin Siu and C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH Asia), 2012

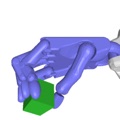
Synthesis of Detailed Hand Manipulations Using Contact Sampling, Yuting Ye and C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH), 2012

Soft Body Locomotion, Jie Tan, Greg Turk, and C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH), 2012

Controlling Physics-Based Characters Using Soft Contacts, Sumit Jain, and C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH Asia), 2011

Modal-Space Control for Articulated Characters, Sumit Jain and C. Karen Liu, in ACM Transactions on Graphics, 2011

Human Motion Reconstruction from Force Sensors, Sehoon Ha, Yunfei Bai, and C. Karen Liu, in ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA) 2011

Articulated Swimming Creatures, Jie Tan, Yuting Gu, Greg Turk, and C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH), 2011

Task-aware Variations, Michael J. Gielniak, C. Karen Liu, and Andrea L. Thomaz, in IEEE International Conference on Robotics and Automation (ICRA) 2011

Stable Proportional-Derivative Controllers, Jie Tan, C. Karen Liu, and Greg Turk, in IEEE Computer Graphics and Applications (CG&A) 2011, Special Issue on Physically Based Character Animation

Secondary Action in Robot Motion, Michael J. Gielniak, C. Karen Liu, and Andrea L. Thomaz, in IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2010
Stylized Motion Generalization Through Adaptation of Velocity Profile, Michael J. Gielniak, C. Karen Liu, and Andrea L. Thomaz, in IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2010

Optimal Feedback Control for Character Animation Using an Abstract Model, Yuting Ye and C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH), 2010

Performance Capture with Physical Interaction, Nam Nguyen, Nkenge Wheatland, David Brown, Brian Parise, C. Karen Liu, and Victor Zordan, in ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA) 2010

Synthesis of Responsive Motion Using a Dynamic Model, Yuting Ye and C. Karen Liu, in Computer Graphics Forum (Eurographics), 2010

Interactive Synthesis of Human-Object Interaction, Sumit Jain and C. Karen Liu, in ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), 2009

Dextrous Manipulation from a Grasping Pose, C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH), 2009
Performance-Based Control Interface for Character Animation, Satoru Ishigaki, Timothy White, Victor Zordan, and C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH), 2009

Optimization-based Interactive Motion Synthesis, Sumit Jain, Yuting Ye, and C. Karen Liu, in ACM Transactions on Graphics, 2009

Animating Responsive Characters with Dynamic Constraints in Near-Unactuated Coordinates, Yuting Ye and C. Karen Liu, in ACM Transactions on Graphics (SIGGRAPH Asia), 2008

Synthesis of Interactive Hand Manipulation, C. Karen Liu, in ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), 2008
Composition of Complex Optimal Multi-Character Motions, C. Karen Liu, Aaron Hertzmann, and Zoran Popovic, in ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), 2006
Dance Reveals Symmetry Especially in Young Men, William Brown, Lee Cronk, Keith Grochow, Amy Jacobson, C. Karen Liu, Zoran Popovic, and Robert Trivers, in Nature, 2006

Learning Physics-Based Motion Style with Nonlinear Inverse Optimization, C. Karen Liu, Aaron Hertzmann, and Zoran Popovic, in ACM Transactions on Graphics (SIGGRAPH), 2005

Momentum-Based Parameterization of Dynamic Character Motion, Yuihi Abe, C. Karen Liu, and Zoran Popovic, in ACM SIGGRAPH / Eurographics Symposium on Computer Animation (SCA), 2004

Synthesis of Complex Dynamics Character Motion from Simple Animation, C. Karen Liu and Zoran Popovic, in ACM Transactions on Graphics (SIGGRAPH), 2002
Code and Tutorials
A Short Tutorial on Multibody Dynamics
(If you find this tutorial useful, please cite this technical report: Bibtex)
Contact Handling for Articulated Rigid Bodies Using LCP
(If you find this tutorial useful, please cite this technical report: Bibtex)
Angular Momentum Computation for Multibody Systems
(If you find this tutorial useful, please cite this technical report: Bibtex)
Teaching
CS4496: Computer Animation for Undergrads
CS7496: Computer Animation for Grads
CS Phd Computer Graphics and Visualization
Robotics PhD Mechanics Core Area
Students
Current students:
Alex Clegg (PhD)
Yifeng Jiang (PhD)
Visak CV Kumar (PhD)
Wenhao Yu (PhD)
Past PhDs and Postdocs:
Yunfei Bai (PhD, Google)
Jeff Bingham (Postdoc, Google)
Michael Gielniak (Postdoc)
Michael Grey (PhD, OSRF)
Sehoon Ha (PhD, Google)
Sumit Jain (PhD, Google)
Yun Seong Song (Postdoc, Missouri S&T)
Jie Tan (PhD, Google)
Yuting Ye (PhD, Facebook)
Awards







